? ? ? ? 智能停車(chē)場(chǎng)系統中����,輸入的數據主要設備就是停車(chē)場(chǎng)攝像頭�����。當車(chē)輛需要進(jìn)入停車(chē)場(chǎng)時(shí)�,停車(chē)場(chǎng)的攝像頭負責將車(chē)輛情況拍攝出來(lái)����,再傳輸到系統中進(jìn)行分析�,系統將拍攝到的畫(huà)面進(jìn)行分割或者是根據預設定的區域算法等��,先將車(chē)輛牌照區域分離�����,加以識別出具體的號碼���,然后再匹配到系統中的車(chē)輛牌照信息���,得到是否放行的結果����。而當車(chē)輛需要駛出停車(chē)場(chǎng)時(shí)����,停車(chē)場(chǎng)的攝像頭負責將車(chē)輛拍攝出來(lái)�,再傳輸到系統中進(jìn)行分析�,得到牌照號碼后再將計時(shí)計費信息調出��,VIP車(chē)輛與臨時(shí)車(chē)輛在扣費系統生效后得以放行���。
?
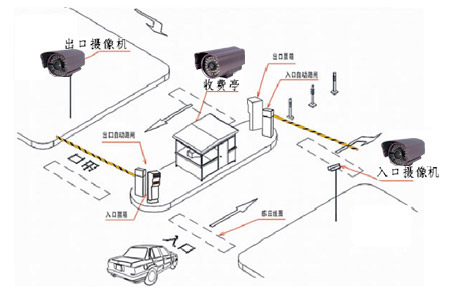
停車(chē)場(chǎng)攝像頭安裝示意圖
?
? ? ? ? 智能停車(chē)場(chǎng)系統的工作原理大概就是如此�,其中我們關(guān)注到�,在這個(gè)系統中�����,攝像頭作為信息輸入的主要載體�����,顯得特別重要��。也就是說(shuō)停車(chē)場(chǎng)攝像頭的性能決定了這個(gè)智能停車(chē)場(chǎng)性能的好壞�����。那么����,作為智能停車(chē)場(chǎng)攝像頭��,需要具備哪些能力呢�����?
?
? ? ? ? 首先�,攝像頭要具備火眼金睛��。分辨率要高�,這個(gè)很容易理解����。攝像頭分辨率越高�,對畫(huà)面的抓取分析更加容易���,出錯率也低��,對于整個(gè)系統工作的反應速度加快也更有利��。試想��,如果攝像頭分辨率不高�,車(chē)輛需要完全停在某處才能識別出車(chē)輛牌照�,那么對于駕駛員的體驗感是不好的�,下次還有誰(shuí)會(huì )愿意到這個(gè)停車(chē)場(chǎng)停車(chē)����。所以��,智能停車(chē)場(chǎng)攝像頭需要一款I(lǐng)SO12233-2014分辨率測試卡�����。ISO12233-2014分辨率測試卡能夠測試攝像頭銳度��、橫向色差����、階調反應����、色彩反應以及噪點(diǎn)����。
?
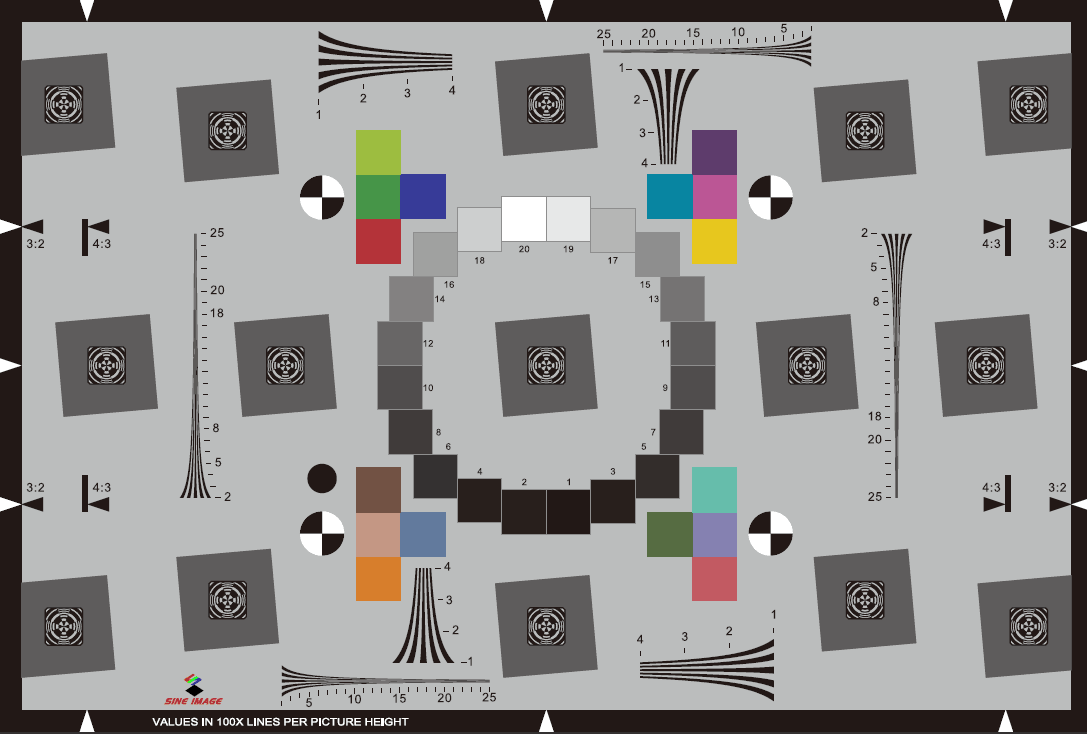
ISO12233-2014分辨率測試卡
?
? ? ? ? 其次���,攝像頭要能全能����。要具備寬動(dòng)態(tài)范圍技術(shù)���。攝像頭在白天光度條件好的時(shí)候能夠正常工作����,停車(chē)場(chǎng)攝像頭也應該能在晚上很好的工作��。這就需要讓智能停車(chē)場(chǎng)攝像頭具備在白天光照強烈時(shí)�����,車(chē)輛由強光區域駛入較暗的停車(chē)場(chǎng)區域�����,或者是較暗的停車(chē)場(chǎng)區域駛出到較強的光亮區域��。而晚上車(chē)輛一般會(huì )開(kāi)啟燈光��,相對攝像頭來(lái)說(shuō)是逆光�����,攝像頭如果不具備寬動(dòng)態(tài)范圍技術(shù)�,將無(wú)法拍攝出車(chē)輛的號牌����。所以���,智能停車(chē)場(chǎng)攝像頭需要一款動(dòng)態(tài)范圍測試卡����。動(dòng)態(tài)范圍測試卡可以測試攝像頭的動(dòng)態(tài)范圍�����,噪點(diǎn)�����,SNR等參數����。
?
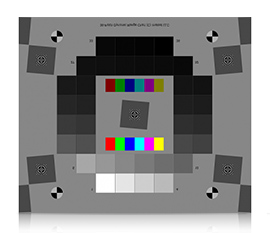
動(dòng)態(tài)范圍測試卡
?
? ? ? ? 再次�����,攝像頭要精確�。要有良好的降噪能力���。如果攝像頭的噪聲不能夠降低�����,對于智能停車(chē)場(chǎng)系統來(lái)處理拍攝出的圖片信息簡(jiǎn)直是災難�����,系統因為較多的白點(diǎn)導致車(chē)輛牌照的字符識別困難����。那么則無(wú)法開(kāi)啟閘門(mén)�����,影響用戶(hù)對這個(gè)系統的體驗��。所以���,此時(shí)�����,攝像頭還行要一款SFR puls測試卡或者是伽馬及灰度測試卡����。SFR puls測試卡能夠測試攝像頭的MTF清晰度/分辨率�����、畸變和視場(chǎng)角���、色彩精度���、橫向色差���、噪點(diǎn)����、ISO敏感度以及Gamma和色調響應�?;译A測試卡能夠測試噪聲����、動(dòng)態(tài)范圍�����、對比度���、曝光的準確性���,鏡頭炫光等參數�����。
?
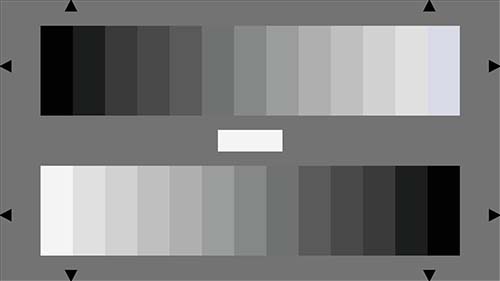
灰階測試卡
?
? ? ? ?總結:智能停車(chē)場(chǎng)攝像頭測試需要以上幾款主要的測試卡�����,如果智能停車(chē)場(chǎng)本身的系統設計的不夠���,那么停車(chē)場(chǎng)攝像頭可能將承受更多的信息輸入信息任務(wù)�,那么在其他的性能上也需要追加測試卡進(jìn)行測試��。